Mají roboauta zabíjet ve jménu většího blaha lidstva? | Kapitola 5

Seznam kapitol
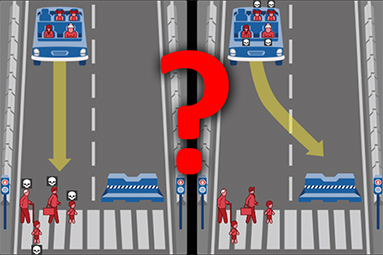
Automatická auta se blíží a s nimi se vynořila řada obskurních testů, díky nimž mohou youtubeři přežít další týdny. Jsou založené na komplikovaných rozhodováních: Je lepší zabít posádku robovozu, nebo napálit do autobusu a ohrozit jeho pasažéry? Smést děti ze školky, anebo důchodkyně pomáhající v charitě? Jaký smysl ale mají taková dilemata?
Podobné dilema může nastat i u skutečně inteligentních autonomních vozidel. Základní problém s autonomním rozhodováním u automobilů je v tom, že to poslední, co u nich chcete, je skutečná kreativita. U profesionálních řidičů je velmi vysoké IQ (zhruba nad 120) nevýhoda, protože neotřelá a kreativní řešení inteligentních řidičů vnášejí do dopravních situací nebezpečnou nejistotu. Volně řečeno, pokud musíte řešit nebezpečnou situaci, je podstatně lepší, když víte, jak ji bude řešit protistrana, než když před vámi provede něco, co je mimo horizont vašeho chápání. Z hlediska autonomní automobilové inteligence je proto mnohem lepší, když se všichni účastníci provozu budou chovat předvídatelně, než když budou kreativní anebo zohledňovat etiku anebo to, co pod etikou chápou.
Extrémním, nicméně pravděpodobně nejvíce funkčním konceptem automobilové umělé inteligence, je kolaborativní inteligence. Ta má dvě formy: Rojová inteligence (swarm intelligence), tedy komplexní chování založené na reakcích jedinců na reakce jiných jedinců anebo čistě kolaborativní inteligenci, která je založena vzájemné aktivní komunikaci.
Zatímco se autonomní a neautonomní auta blíží ke křižovatce, vyměňují si navzájem informace o tom, co kdo bude dělat a vyjednávají na téma jak naložit s tím účastníkem dopravního provozu, který digitálně nekomunikuje, protože to je třeba koňský povoz anebo cyklista.
Kolaborativní inteligence není založena na nezávislém uvažování každého účastníka, ale na maximálním vzájemném vyjednávání podle předem daných pravidel. Taková inteligence nabízí za normálních okolností dost možná bezpečnější provoz na silnicích než u lidí, protože se rozhodování neřídí náladami a motivacemi jednotlivých účastníků, ale jejich vzájemné snaze minimalizovat pravděpodobnost kolize.
Opravdová kolaborativní inteligence je komplikovaná, vyžaduje vzájemně kompatibilní protokoly a strategie jak nakládat s dopravními elementy, které nekomunikují. Vyžaduje vysokou míru standardizace a také strategie, jak se zachovat v případech, které zmiňuje etický kalkulus, který jsem rozebíral na začátku. Její výhodou je ale naopak to, že dovoluje sdílení informací (i když nemáme centrální dispečink, vozy mohou broadcastovat informaci o situaci, kterou vidí před sebou i na vozidla za sebou) a dokonce dovoluje kolaboraci v krizi – když jednomu vozu například vypadne senzor, oznámí to ostatním a ony mu dodávají chybějící data.